热点资讯
行业新闻
推荐信息
石墩河乡机电设备伺服式MFL60-L1-5-14-50机械传动设备
文章来源:ymcdkj
发布时间:2024-04-17 09:00:30
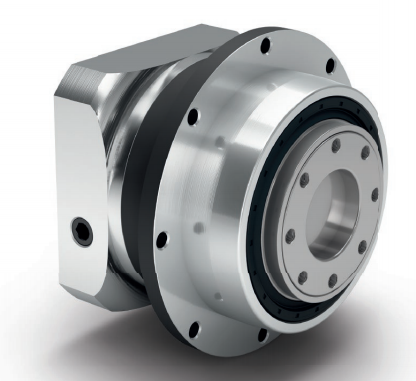
石墩河乡机电设备:伺服式MFL60-L1-5-14-50机械传动设备
塑料滑动轴承磨削后进行超精的工件,一般装配后可减小运转噪声8~1dB,而且振动小.运转平稳。超精塑料滑动轴承的余量比磨削余量减小一个数量级,实际上只有几个微米。为低压力进给。因此超精的尺寸分散度很小,合格率极高。超精塑料滑动轴承表面为交叉网纹,容易存油,不会出现磨削时易磨损、易发热和烧研现象。超精塑料滑动轴承具有较复杂的轨迹,而且能由切削作用过渡到研磨,可较快地降低表面粗糙度。
行星齿轮减速机传动的主要特点如下
1、运动平稳、抗冲击和振动的能力较强 由于采用了数个结构相同的行星轮,均匀地分布于中心轮的周围,从而可使行星轮与转臂的性力相互平衡。同轴减速机同时,也使参与啮合的齿数增多,故行星齿轮传动的运动平稳,抵抗冲击和振动的能力较强,工作较可靠。
2、传动比较大,可以实现运动的与 只要适当选择行星齿轮传动的类型及配齿方案,便可以用少数几个齿轮而获得很大的传动比。在仅作为传递运动的行星齿轮减速机传动中,其传动比可达到几千。应该指出,行星齿轮传动在其传动比很大时,仍然可保持结构紧凑、质量小、体积小等许多优点。而且,它还可以实现运动的与以及实现各种变速的复杂的运动。
伺服行星减速机在机械手上的应用
机械手是为生产自动化周边专门配备的机械,它可以在减轻繁重的体力劳动、改善劳动条件和安全生产;能够模仿人体上肢的部分功能替代重复的工作,可以对其进行自动控制使其按照预定要求输送制品或操持工具进行生产操作的自动化生产设备。提高数控机床和注塑机、压铸机及自动化设备的生产效率、稳定产品质量、降低废品率、降低生产成本、增强企业的竞争力等方面起到重要的作用。
三轴机械手:由X轴、Y轴、Z轴组成,X轴这个距离一般叫反冲行程,其大小和部件厚度有关。Y轴这个距离定义为垂直行程,是由机器高度和所需下降高度所决定的,也就是说,机械手必须足够高,以使部件能跳过机械,又要足够低,从而能在离地面合理的高度上放下部件;Z轴来回行程的大小有赖于机械手是在机械侧边还是在后边将部件放下。利用这种行程的部件只是为了跳过机器。
智能型机械手:该类型机械手一般包括多点记忆置放、任意点待机、较多自由度等功能,采用伺服驱动配精密行星减速机,能够进行限度的仿人执行比较复杂的操作,还可以通过配备 的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能的专用机器人。随着人工成本的增加以及效率的提高,机械手将成为自动化设备的必备辅机推动工业自动化的效率和提升企业收益。
交流伺服系统反馈分为电流反馈、速度反馈和位置反馈三个部分。其中电流环的控制是为了保证定子电流对矢量控制指令的准确快速 。 电流环是内环,SVPWM控制算法的实现主要集中在电流环上,电流环性能指标的好坏,特别是动态特性,将影响速度、位置环。 PI调节器不同于P调节器的特点: 1) P调节器的输出量总是正比于其输入量; 2) 而PI调节器输出量的稳态值与输入无关, 而是由它后面环节的需要决 定的。后面需要PI调节器多么大的输出值, 它就能多少, 直到饱和为止。 电流环常采用PI控制器,目的是把P控制器不为0 的静态偏差变为0。电流环控制器的作用有以下几个方面: 3) 内环;在外环调速的过程中,它的作用是使电流紧跟其给定电流值(即 外环调节器的输出); 4) 对电网电压波动起及时抗干扰作用; 5) 在转速动态过程中(起动、升降速)中,保证获得电机允许的电流-即加速了动态过程;6) 过载或者转时,限制电枢电流的值,起快速的自动保护作用。 电流环的控制指标主要是以跟随性能为主的。在稳态上,要求无静差;在动态上,不允许电枢电流在突加控用时有太大的超调,以保证电流电流在动态过程中不超过允许值。 双闭环电机调速过程中所希望达到的目标: 1) 起动过程中: 只有电流负反馈, 没有转速负反馈。 2) 达到稳态后: 转速负反馈起主导作用; 电流负反馈仅为电流随动子系统。