热点资讯
行业新闻
推荐信息
责任担当电机步进式AL155-L1-3-K5-42正反转行星减速箱
文章来源:ymcdkj
发布时间:2024-04-25 14:53:28
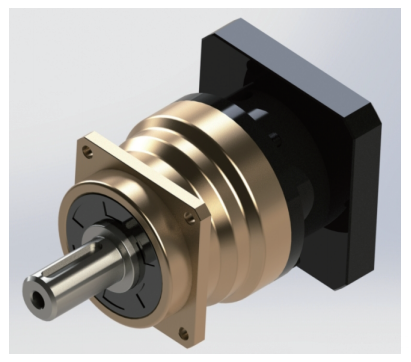
42正反转行星减速箱
设计模具与型芯应考虑足够的排气措施。氧化夹渣预防氧化夹渣的措施:严格控制熔炼工艺,快速熔炼,减少氧化,除渣。Al-Mg合金必须在覆盖剂下熔炼。熔炉、工具要清洁,不得有氧化物,并应预热,涂料涂后应烘干使用。设计的浇注系统必须有稳流、缓冲、撇渣能力。采用倾斜浇注系统,使液流稳定,不产生二次氧化。选用的涂料粘附力要强,浇注过程中不产生剥落而进入铸件中形成夹渣。热裂预防产生热裂的措施:实际浇注系统时应避免局部过热,减少内应力。
伺服精密减速机主要的特点表现为,性价比非常之高,整体应用更加广泛,经济实用性强,寿命长,在整个实际操作与控制当中,发挥出更好的伺服刚性效果,并且可以实行准确控制。在整个上运行,效率较高,输入转速高,运行更加平稳,噪音更小。
当然在整个外形和结构设计方面,有着自身独有的特色。在进行使用的时候,可以终身不需要更换润滑油。不管在什么地方,都可以有效避免操作过程中,出现全封闭式的设计,并且在整个保护程度上,耐气候性更强。不管在什么环境当中,都可以运行。而且精密行星齿轮减速机整体结构非常紧凑,间隙相对要小,因此精密度高,集成度高,使得额定输出,有着较大的功效。
1, 如何正确选择伺服电机和步进电机?
主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界面和通讯方面的要求),主要控制方式是位置、转矩还是速度方式。供电电源是直流还是交流电源,或电池供电,电压范围。据此以确定电机和配用驱动器或控制器的型号。
2, 选择步进电机还是伺服电机系统?
其实,选择什么样的电机应根据具体应用情况而定,各有其特点。
3, 如何配用步进电机驱动器?
根据电机的电流,配用大于或等于此电流的驱动器。如果需要低振动或高精度时,可配用细分型驱动器。对于大转矩电机,尽可能用高电压型驱动器,以获得良好的高速性能。
4, 2 相和 5 相步进电机有何区别,如何选择?
2 相电机成本低,但在低速时的震动较大,高速时的力矩下降快。 5 相电机则振动较小,高速性能好,比 2 相电机的速度高 30~50% ,可在部分场合取代伺服电机。
电机方面:
伺服电机的材料、结构和技术要远远高于变频器驱动的交流电机(通常交流电机或恒力矩、恒功率等各类变频电机),也就是说当驱动器输出电流、电压、频率改变很快的电源时,伺服电机就能依据电源改变发生呼应的动作改变,响应特性和抗过载才能远远高于变频器驱动的交流电机,电机方面的区别也是两者功能不一样的根本。就是说不是变频输出不了改变那么快的电源信号,而是电机自身就反应不了,所以在变频的内部算法设定时为了维护电机了相应的过载设定。当然即便不设定变频器的输出能力仍是有限的,有些功能的变频器就可以直接驱动伺服电机。
伺服驱动器方面:
伺服驱动器在展了变频技能的前提下,在驱动器内部的电流环,速度环和方位环(变频器没有该环)都进行了比通常变频更准确的操控技能和算法运算,在功能上也比传统的伺服强大许多,主要的一点能够进行准确的方位操控。经过上位操控器发送的脉冲序列来操控速度和方位(当然也有些伺服内部集成了操控单元或经过总线通讯的方法直接将方位和速度等参数设定在驱动器里),驱动器内部的算法和更快更准确的计算以及性能更优良的电子器件使之更优越于变频器。
+
-0E1-2S
SPK 100-MF1- r> SPK 180-M 0-060
SPK 140S-MF1-3 -4 -5 -7 -10-0G1-2S
0-0G1-2S
SPK 180S-MF1-3 -4 -5 -7 -10-1G1-2S
SPK 180S br> SPK 140S-MF1-3 -4 -5 -7 -10-1G0-2S
SPK 1 2S
SPK 075S-MF1-3 -4 -5 -7 -10-1E0-2S
SP E0-2S
SPK 075-MF1-3 SPK 075S-MF1-3 -4 -5 -7 -10-1C1-2S
SPK 075S br> SPK 075- 00
SPK 075S-MC1-3 -4 -5 -7 -10-1E1-2K
SP E1-2K
SPK 075S-MC1-3 -4 -5 -7 -10-0E0-2K
0-0E0-2K
SPK 100S-MF1-3 -4 -5 -7 -10-0G1-2S
SPK 100S br> SPK 060G-MF1-3 -4 -5 -7 -10-1E1-2S
SPK 0 2S
SPK 1 1-000
SP
下一篇:市北学校课桌椅实木书法桌