热点资讯
行业新闻
推荐信息
互利共赢机械设备伊明牌AH140-L1-5-K5-35结构轻行星减速器
文章来源:ymcdkj
发布时间:2024-04-26 19:15:15
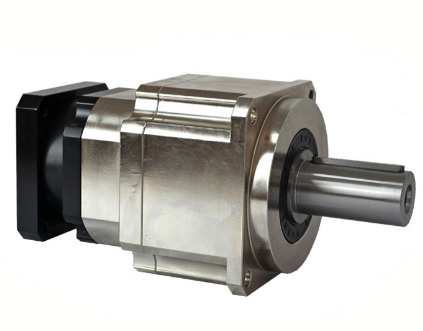
互利共赢机械设备:伊明牌AH140-L1-5-K5-35结构轻行星减速器
防爆手拉葫芦可以在很特殊的环境中进行施工,其防爆性能是十分良好的,同时只有正确使用这种防爆手拉葫芦才能够达到预期的效果。在进行起吊的时候千万不要让人在重物下面工作或走动,避免意外的发生。在拉动的时候一定要用力平稳,这是为了防止跳链或者是卡链,发现拉动困难的时候就要马上检查原因,不要硬拉,防止拉断链条或者是销子。应用三角架的时候,三脚一定要维持相对间距,两脚间应用绳索,当绳索置于地面时,要注意防止将作业人员拌倒。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组合为降速传动,传动比一般为1.25~1.67,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组 向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
伺服行星减速机的参数介绍
减速比
输出转速:输入转数
段/级数
行星齿轮的套数。由于一套行星齿轮无法满足较大的传动比,有时需要二套或三套来满足用户对较大传动比的要求,也就是说,减速比越大,段/级数越多,效率越低平均寿命
指减速机在额定负载下,额定输入转数时减速机的连续工作时间。
精度
在高速机械往复运动中到的关键在于尽量减少通过运动产生的角偏差。精度取决于两个值,一个是于加载有关的偏转角,涉及到回程间隙和扭转刚度;另一个是于运动控制有关的偏转角,涉及到同步偏差问题。
回程间隙齿隙
将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙。
额定输出扭矩
指减速机连续长时间工作时可以加载的力矩,条件应满足负载均匀,安全系数大于1.
加速扭矩
指工作周期每小时少于1000次时允许短时间加载.不能超过10000次。
紧急制动扭矩
指减速机输出端所能加载的力矩,这个力矩可 次。
空载扭矩
指加载到减速机上的以克服减速机内摩擦力的力矩。
扭矩
指减速机在静态条件或频繁启动条件下所能承受的输出扭矩,通常指峰值负载或启动负载。
实际所需扭矩
所需扭矩取决于应用场合的实际工况,拟选减速机的额定扭矩必须大于这个扭矩。
侧倾扭矩
指轴向力和径向力作用于输出端轴承上径向受力点的力矩。
轴向力
是指平行于轴心的一个力,它的作用点与输出轴端有一定的轴向偏差时,会形成一个额外的弯挠力矩。轴向力超过额定值时,需用联轴节来抵消这种弯挠力。
径向力
指垂直作用于轴向力的一个力,它的作用点与轴端有一定的轴向距离,这个点成一个杠杆点,横向力形成一个弯挠力矩。
轴伸径向载荷
选择减速机的附加依据是输出轴伸出端上的径向载荷和轴向载荷。轴的强度和轴承的承载能力决定了许用轴伸的径向载荷。产品样本中给出的允许值是指在 不利的方向作用在轴伸出端中点的力。当作用力不在中点时,越接近轴肩,允许的径向载荷就越大;相反,作用点离轴肩越远,允许的径向载荷就越小。
安全系数
安全系数等于减速机的额定输入功率与电机功率的比值。
使用系数
使用系数表现减速机的应用特性,它考虑到减速机的负载类型和每日工作时间。
力矩
减速机的以及电机与减速机的连接(输入轴采用性联轴器要求),都是有力矩要求。建议使用力矩扳手来完成步骤。
为什么大家都认可摆线减速机?摆线减速机运行平整稳定,工作时耳的声音小,摆线针齿啮合齿数量非常的多,重叠系数十分大与包含了机件维持平衡的机器原理,让振动与产生的不悦耳声音保证在。而且成本比较低,其分为输入部分、减速部分、输出部分等三部分。降速功能比更加强大。
摆线减速机采用摆线针齿啮合的新颖传动装置,在输入轴上装有一个错位180°的双偏心套,在偏心套上装有两个滚柱轴承,形成H机构,两个摆线轮的中心孔即为偏心套上转臂轴承的滚道,并由摆线轮与针齿轮上一组环形排列的针齿轮相啮合,以组成少齿差内啮合减速机构。
+
K3-19DB19
K3-14BK14
K3-14BM11
-K3-8AG8